歡迎光臨~河南(nán)省精品国产人成亚洲区模具有限公司(sī)

0373-54338880373-7022565
0373-54338880373-7022565

更新日期:2018-12-12 13:52:13
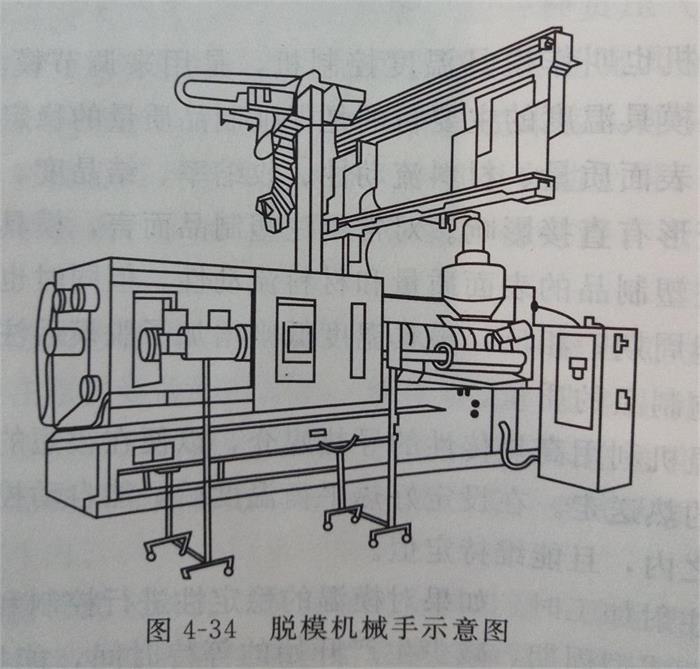
注塑製品脫(tuō)模時,對一些人工脫模不便(biàn)、形狀(zhuàng)複雜、薄(báo)壁的、易碎的、外(wài)觀要(yào)求特雖高的注射製品,已越來越多地采用(yòng)機械手。設計時,要考慮適當的夾持方式(機械夾持或氣吸(xī))、夾持質量(liàng)、夾持壓(yā)力、取出時的運動軌跡(一般由水平、垂直和回轉三部分組成)、動作速度(dù)和行程、對位置重複精度等要求。
在機械手使用中,最重要的是與注射機的動作配合問題。主要注(zhù)意以下(xià)幾個問題:
1、機械手離開模具後,機械手與注射機應(yīng)能夠各(gè)自繼續動(dòng)作,以縮短成型周期;
2、在選擇(zé)機械手(shǒu)時,應考慮物品的夾持要求;
3、機械手運動速度越快,則越容易產生振動,要考慮機械手產生的慣性振動,能(néng)否被(bèi)注射機合模機構所(suǒ)吸收。
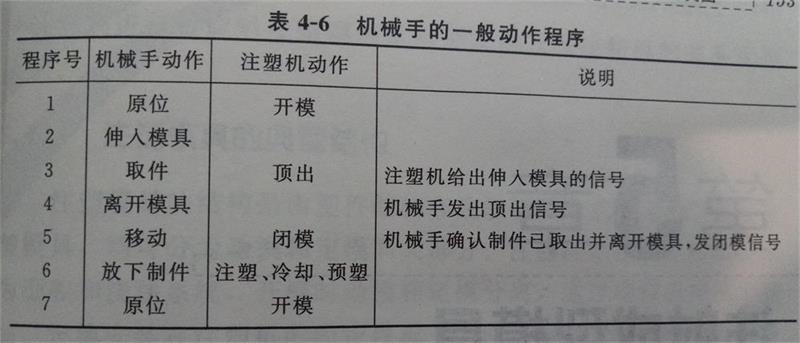
機械手的一般動作程序如表所示。
目前常見的機械手有兩類:一類是用交流伺服電機驅動;另一類是用氣動式機械手。
銷售經理:18337377787
采購經理(lǐ):0373-7022565
電 話:0373-5433888
傳 真:0373-5433868
郵 箱:info@tjhomeaway.com
地 址:新鄉市宏力大道(dào)西賈橋工業區12號
備案號:豫ICP備16026643號-1
